هدف گذاری آموزشی فصل مدل سازی میراگرهای جرمی تنظیمی ( TMD ) و اونگی ( Pendulum TMD )
- اشنایی با میراگرهای جرمی تنظیمی) ( Tuned Mass Damper و اونگ
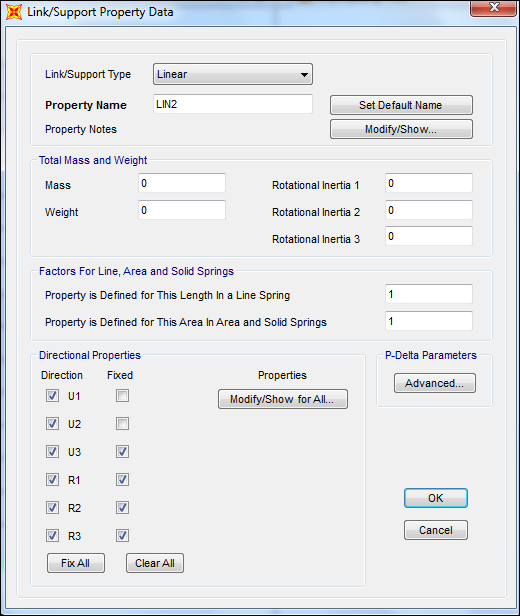
- تعیین پارامترهای میراگر جرمی تنظیمی و اونگ
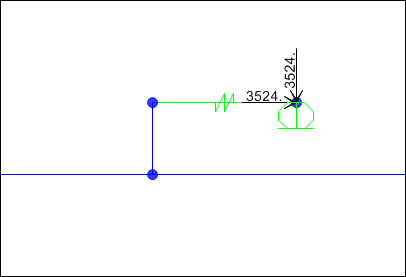
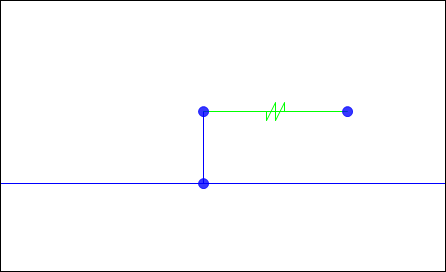
- نحوه ی مدل سازی این میراگر در برنامه Sap2000
- اعمال یک شتاب به صورت موج کسینوسی به پای سازه
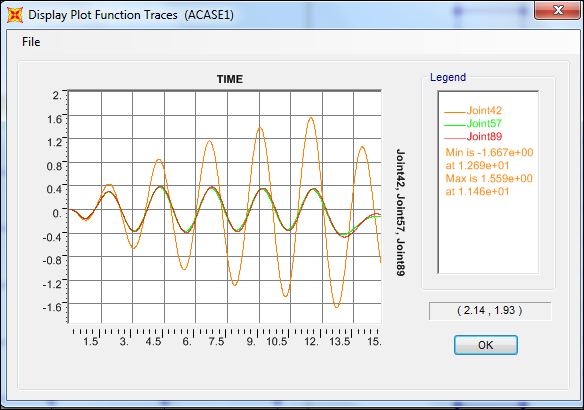
- بررسی نتایج سازه با میراگر جرمی و بدون میراگر جرمی ( TMD ) و تاثیر ان در کاهش ارتعاشات سازه
مقدمه
در بسیاری از سازه ها و پل ها و . . . برای کنترل ارتعاشات ناشی زلزله , باد و یا ارتعاشات ناشی از فعالیت های انسانی و ماشین الات صنعتی از میراگرهای جرمی تنظیم شونده استفاده می شود . فرضیه ی میراگرهای جرمی تنظیم شونده برای اولین بار در سال 1909 توسط فرام برایت برای کاهش حرکات کشتی ها استفاده شد سپس پایه های علمی و محاسباتی رفتار این میراگرها در مکانیک ارتعاشات بسط پیدا کرد و در سازه های صنعتی و برای کنترل ارتعاشات ماشین الات مورد استفاده قرار گرفت و پس از ان با کسب تجربه در این زمینه از این میراگرها در سازه ها نیز مورد استفاده قرار گرفت و تحقیقات در زمینه ی کاربرد این میراگرها در سازه به صورت گسترده ای ادامه پیدا کرد .